Am Freitag, den 01. Juli 2022, fand in Karlsruhe die Bunte Nacht der Digitalisierung statt. Diese bot mit Hilfe von rund 80 Partnern vielseitige Programmpunkte, wie Vorträge, Ausstellungen, Workshops etc., an.
Zusammen haben wir, der Informatik LK 11, uns entschieden in Form einer Exkursion mit unserem Informatiklehrer Herr Kuschel an der Nacht der Digitalisierung als Besucher teilzunehmen. Somit machten wir uns gegen 14 Uhr auf den Weg nach Karlsruhe und gelangten um 15 Uhr an unsere erste Station für den Tag: Das Institut für Informationsmanagement im Ingenieurwesen (IMI).
Dort zeigte uns ein Student seine Arbeit im letzten Semester, eine Objekterkennung integriert in eine Brille, um beim Suchen von Bauteilen schneller fündig zu werden. Eine Liste mit den gesuchten Bauteilen füllt sich und noch benötigte Teile werden auf der Brille mit einem grünen Punkt und der Anzahl angezeigt.
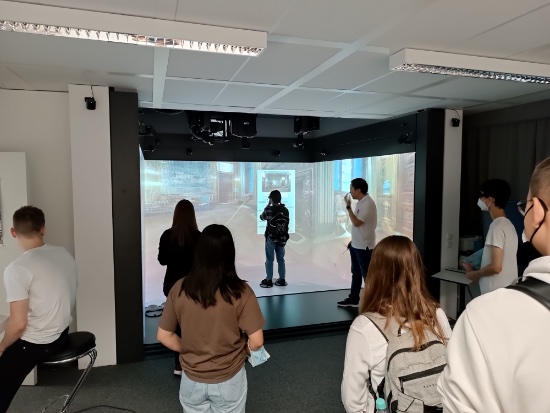
Zwei Räume weiter fanden wir uns vor der sogenannten „Cave“ wieder. Acht verknüpfte Desktops bilden ein betretbares 3-Dimensionales Umfeld. Unterschiedliche Welten wurden uns gezeigt, beispielsweise das Stadion von Akropolis oder auch einen mit Gold geschmückten Schlossraum. Beim Bewegen des Kopfes wird die Perspektive automatisch angepasst, sodass man auch unter Objekte schauen kann. Benutzt wird diese Technik, um beispielsweise Baupläne oder Automodelle besser veranschaulichen zu können.
 |
 |
Unser nächster Programmpunkt gegen 16 Uhr war das Institut für Anthropomatik und Robotik (IAR). Dort lernten wir etwas über Prothesen und über zwei Generationen der ARMAR-Familie (Roboter zur Hilfe für Menschen).
Am IRA wird mitunter an Prothesen geforscht, um Menschen mit fehlenden oder nicht vollständig funktionsfähigen Körperteilen das Leben zu erleichtern. Ob Exoskelette oder Armprothesen, man versucht mit neuster Technologie, wie Kameras, Drucksensoren, Elektroden usw., diese immer weiterzuentwickeln und zu perfektionieren.
Ähnlich sieht es bei den ARMAR-Robotern aus. Per Audio gesteuert helfen ARMAR-3 und ARMAR-6 im Alltag. Bei ARMAR-3 gab es jedoch Steuerungsprobleme, welche bei ARMAR-6 weitestgehend behoben werden konnten. Beide Roboter können eigenständig Objekte erkennen und von Ort zu Ort tragen. Bei ARMAR-6 wurde des Weiteren noch hinzugefügt, eine Leiter aufzustellen, sowie mit einer Person zusammen größere Objekte zu tragen. Durch Drucksensoren wurde versucht, das zu tragende Objekt auszubalancieren, um das Tragen zu vereinfachen.
Anschließend machten wir uns mit sehr vielen Eindrücken ausgestattet auf den Heimweg.
 |
 |
 |